敷地内の駐車場の空き状況を満空表示します。満空の切り替えは、リモコンと表示板の切り替えスイッチにより行います。

TEL:0198-30-2211
FAX:0198-30-2213
〒025-0312 岩手県花巻市二枚橋3-120
敷地内の駐車場の空き状況を満空表示します。満空の切り替えは、リモコンと表示板の切り替えスイッチにより行います。
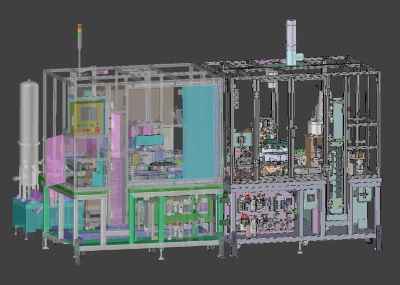
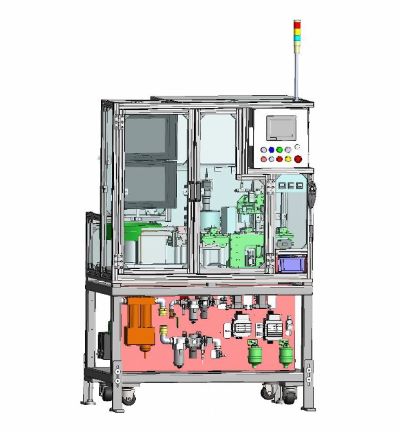
ストッカーに納められたパレットを位置決めステージに引き出し、パレットに並べられたワークを、スカラロボットにより供給位置にセットします。供給位置に置かれたワークは、4連P&P等の搬送機構により研磨工程、排出工程、洗浄工程、エアーブロー工程を経て、スカラーロボットによりパレットに回収されて行きます。パレットにワークが満杯になるとストッカー内の空パレットと交換を行います。
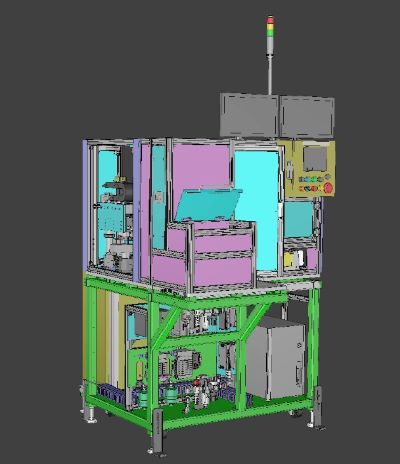
パーツフィーダーから出てきたワークの供給角度の差を画像処理にて算出し、供給角度に合わせてワークを前工程へ供給します。前工程から出てきたワークにQRコードを印字し、印字の状態確認を行い、後工程にワークを渡します。後工程より出てきたワークに対しOK品、NG品の振り分けを行います 。
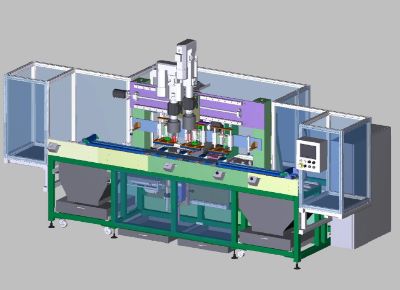
加工種別、長さ等の情報を入力すると、計算式に基づき、加工ユニットがサーボモータ、シリンダにより移動して穴加工を行う装置です。加工ユニットは上から2軸、下から1軸、後ろから1軸の計4軸有り、それぞれが独立して加工を行います 。
パーツフィーダーから出てきたワークを、カメラによる外観検査(キズ、打痕)工程を通して、OK品、NG品の振り分けを行います。
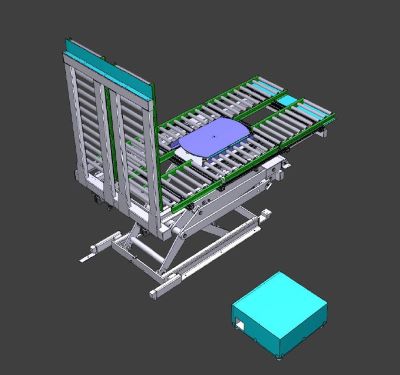
製品の倒し、起こしができる機構を持った昇降リフターとなります。更に、上のテーブルは45度回転できる機構を持っているので、製品の組立や検査に活躍します。
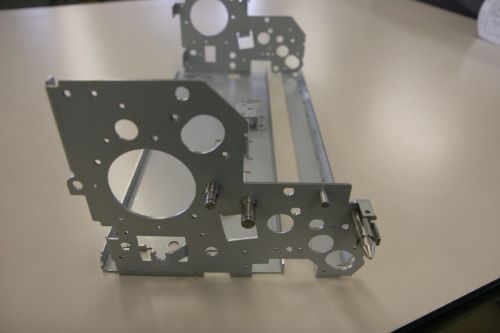
プリンターのフレームになります。精密板金加工は弊社の得意とするところです 。